












This 71.2:1 ratio 5304 Series Saturn Planetary Gear Motor consists of a 24V brushed DC motor driving a 36mm diameter planetary gearbox. It runs at a no-load speed of 260 RPM when 24VDC is applied. While this motor’s nominal voltage is 24V, you can give it plenty of punch with the ever-convenient 20V power tool battery system!
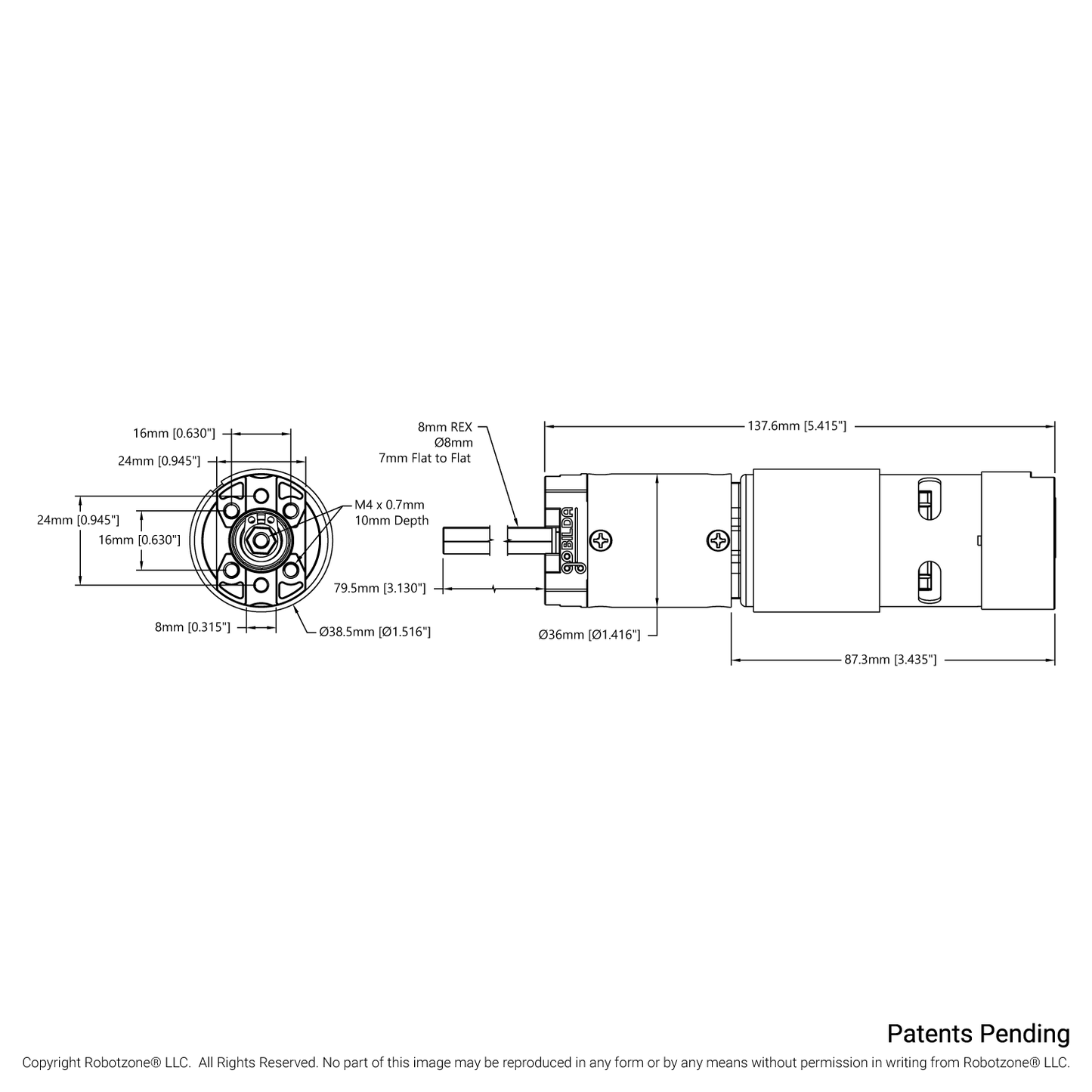
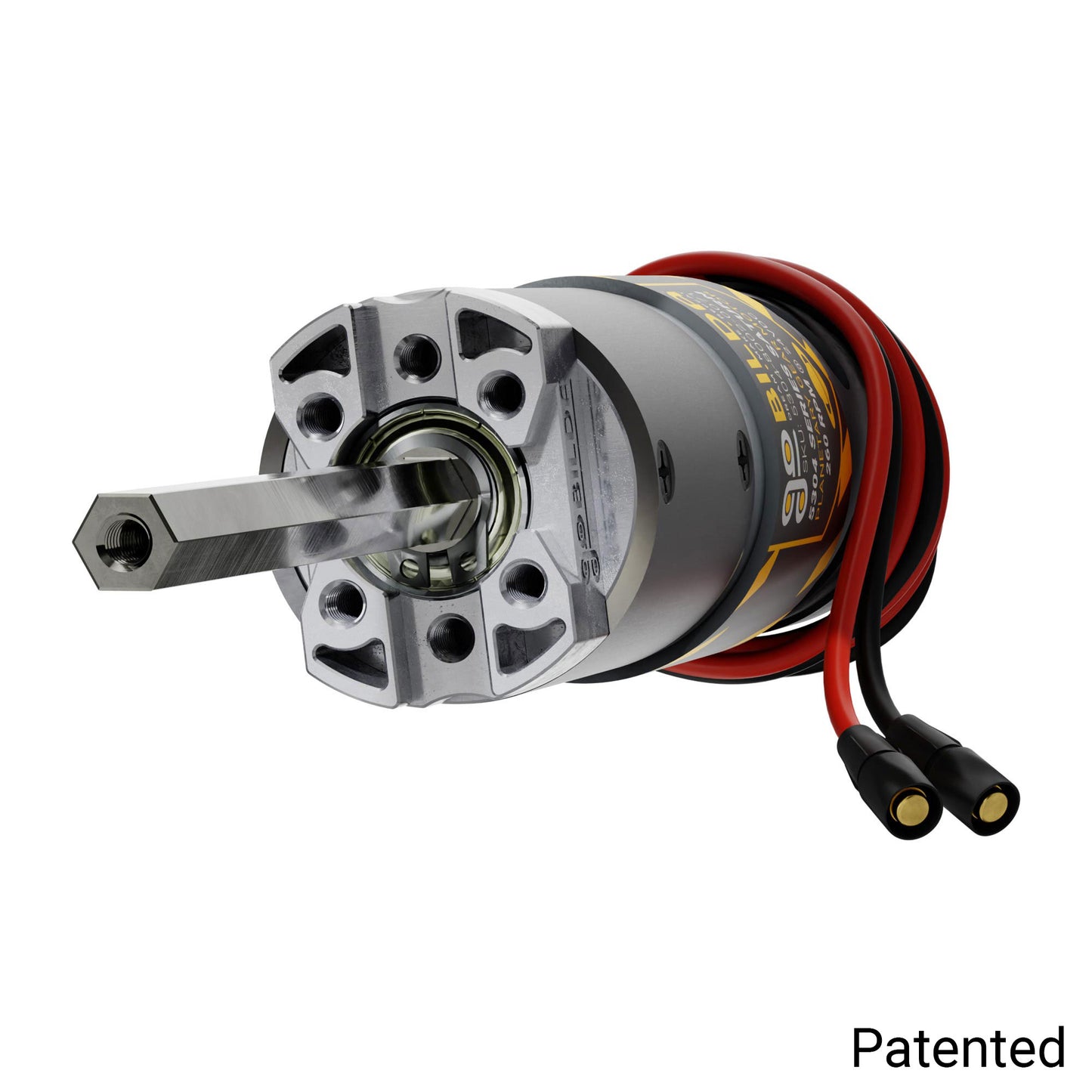
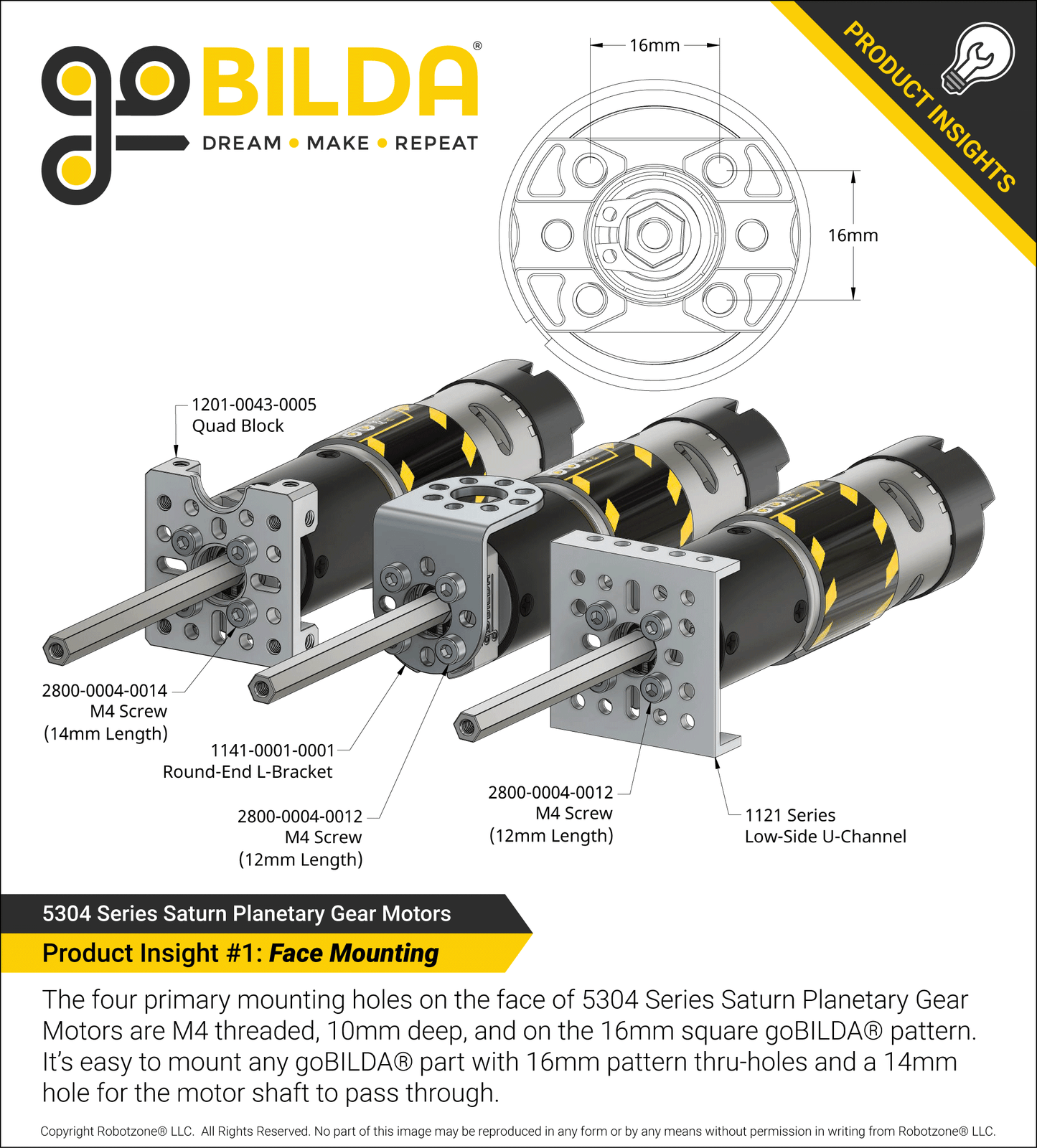
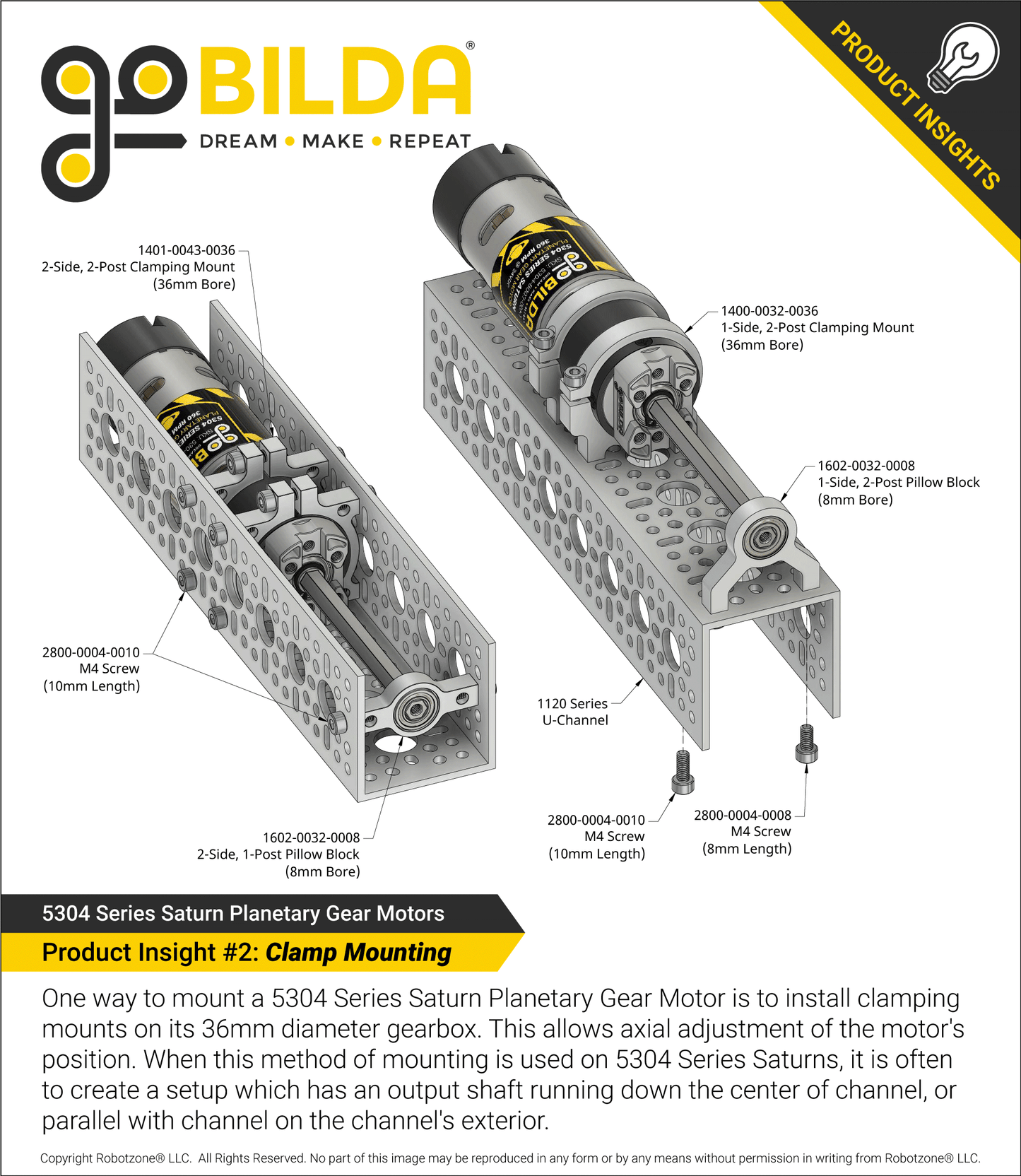
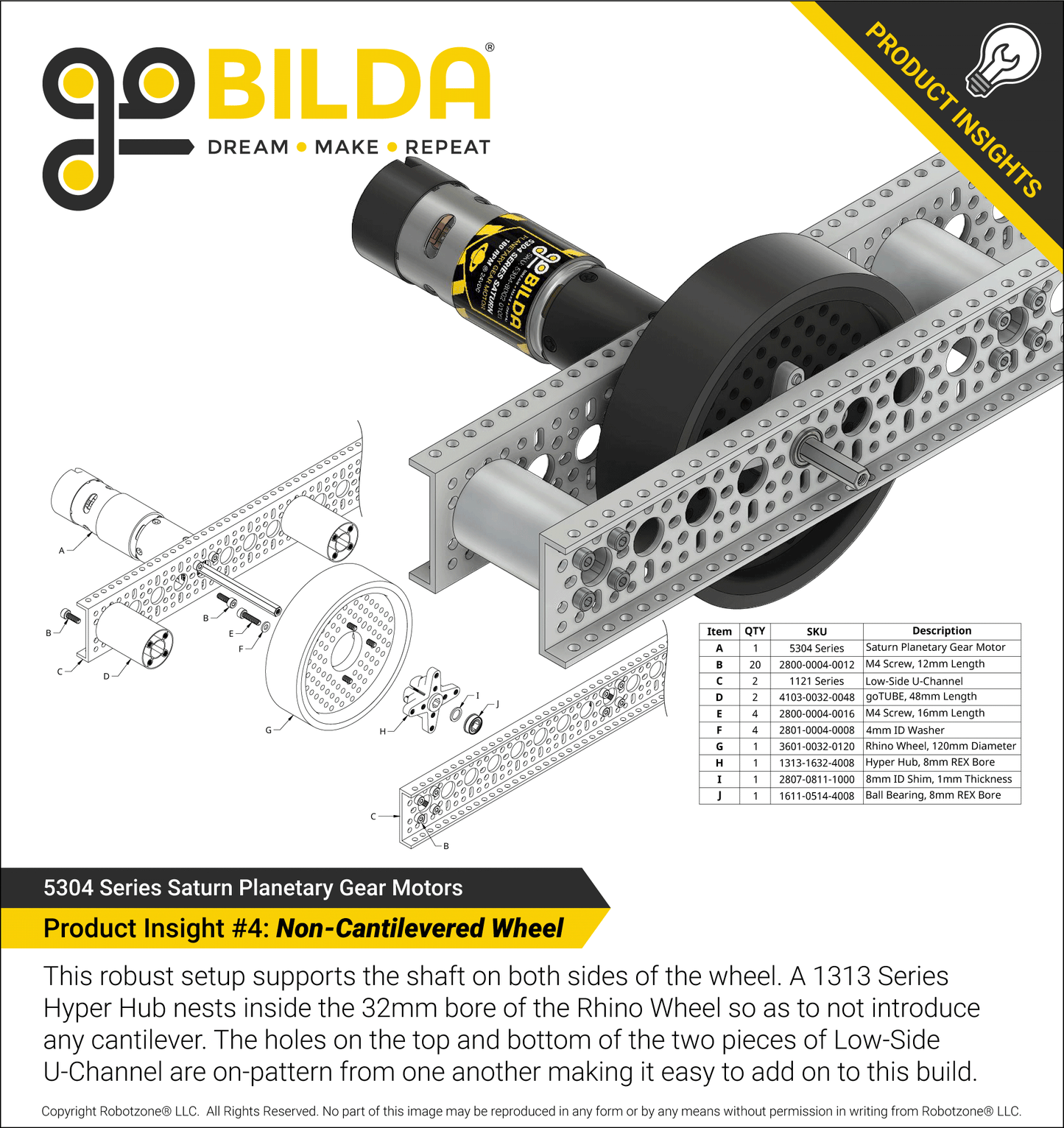
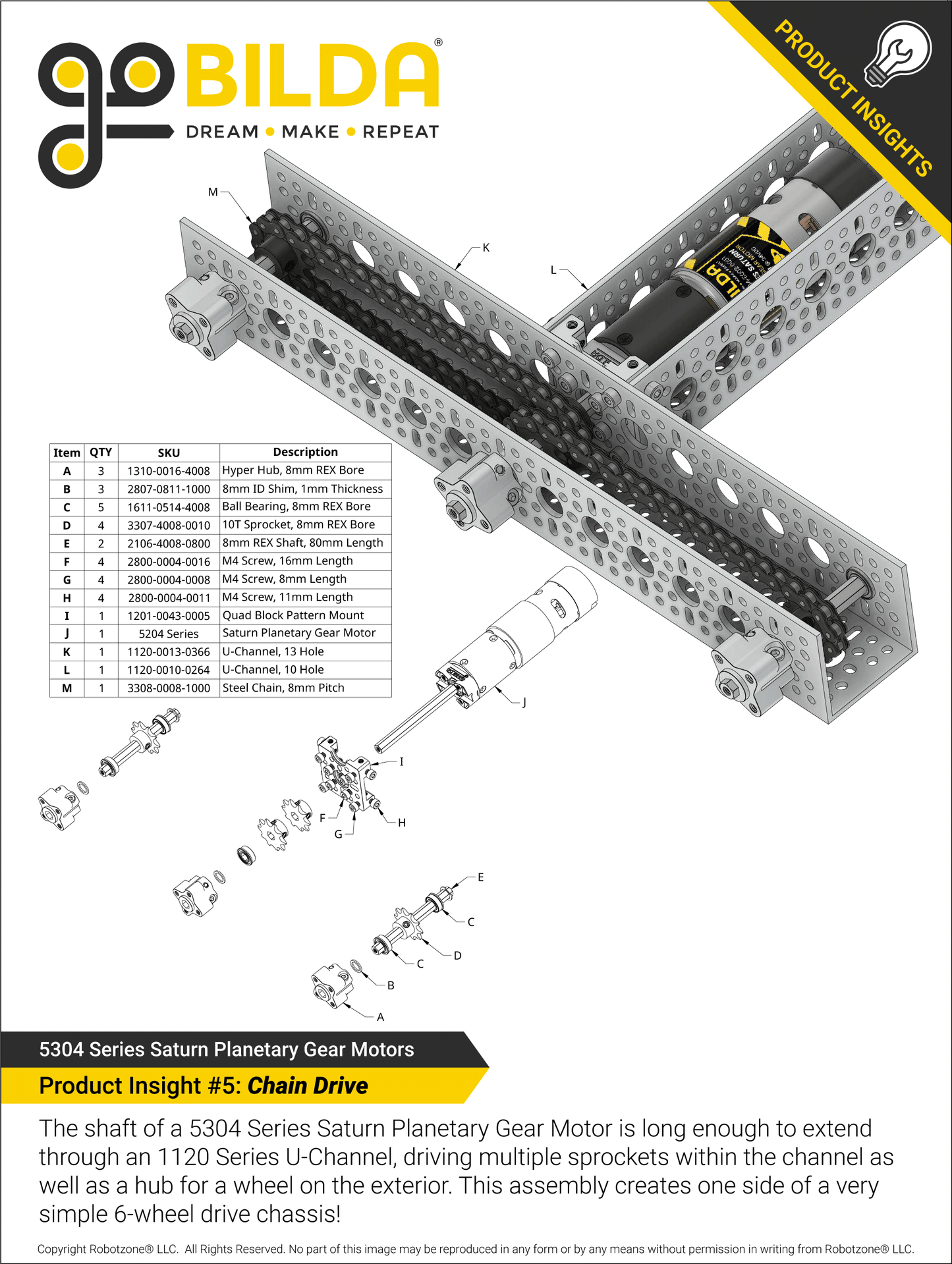
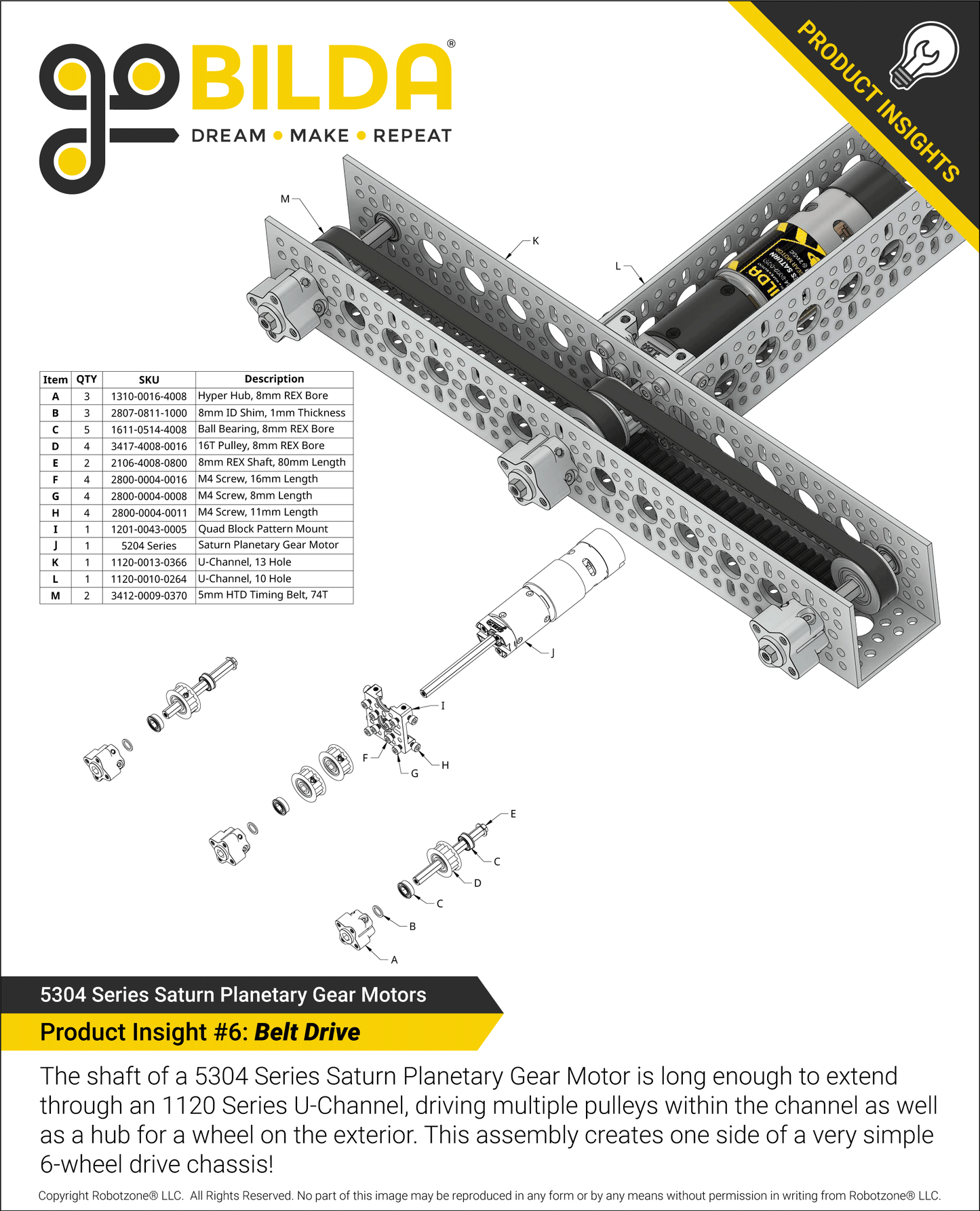
The positive drive 8mm REX™ shaft, which can be supported by an 8mm round bore bearing, has compatibility with a huge variety of goBILDA® motion components. Additionally, this motor’s specially-designed gearbox head allows for direct attachment to goBILDA® components in numerous use-cases made possible by its convenient shape.
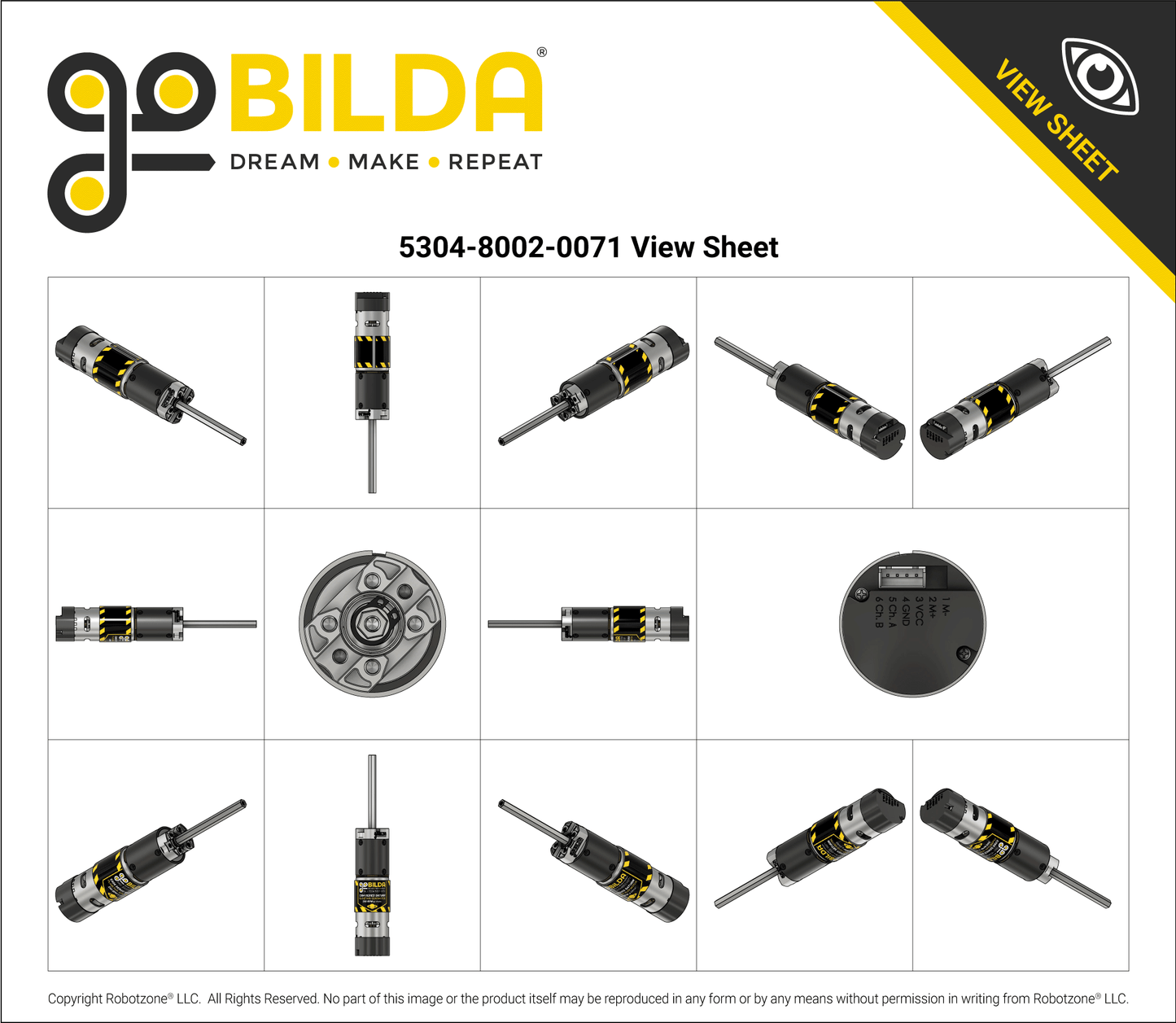
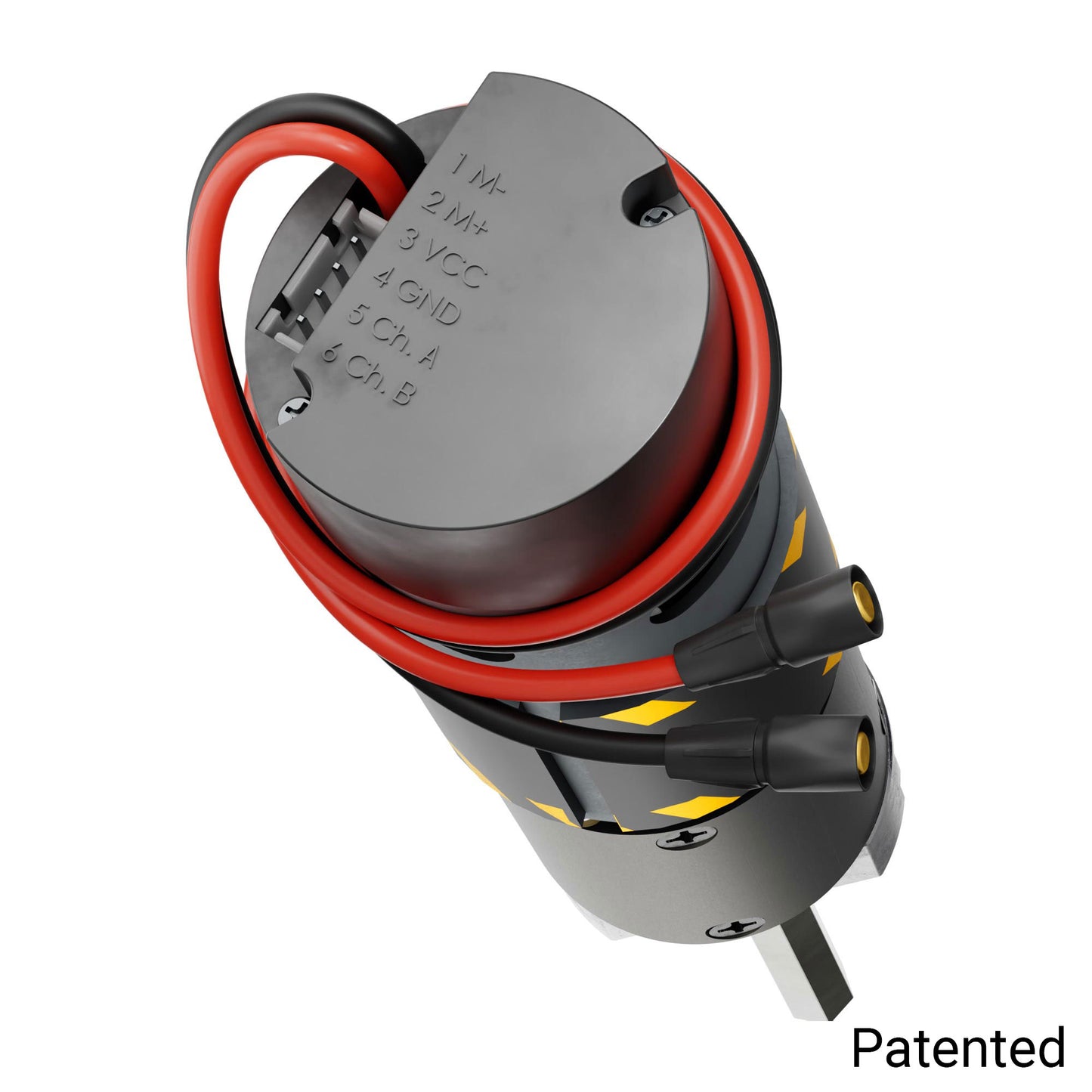
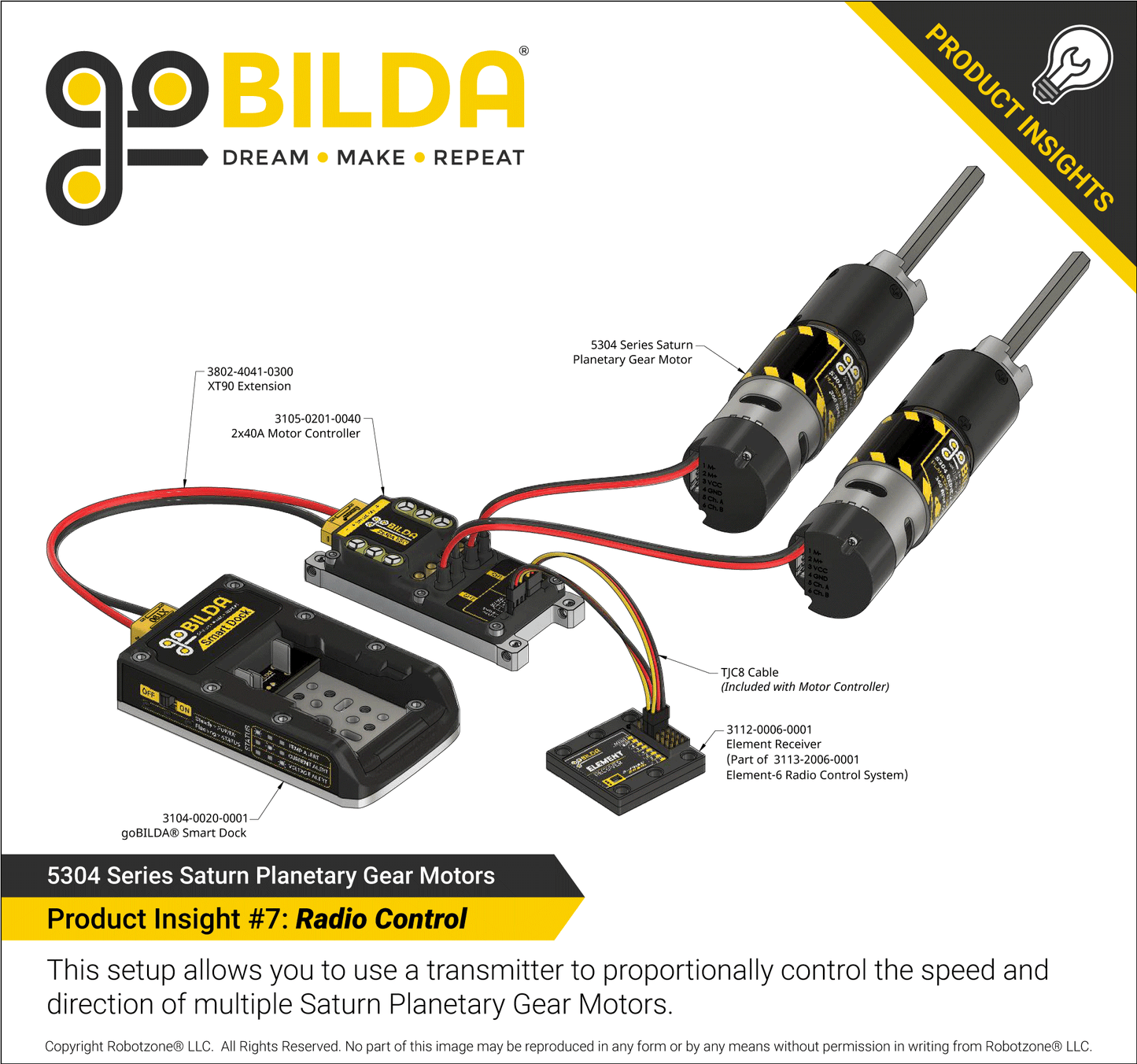
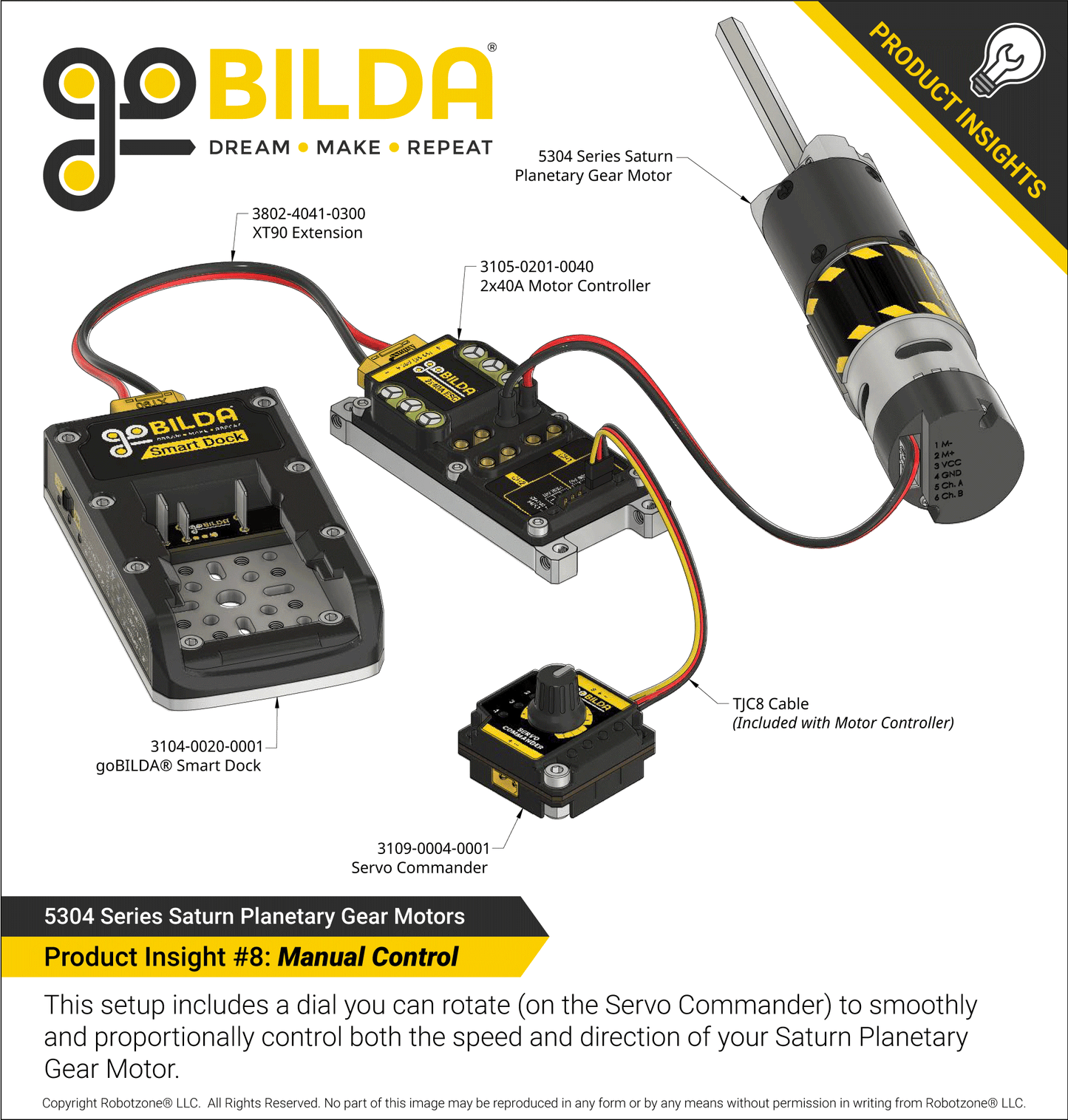
The two power wires provide plug-and-play compatibility with goBILDA® motor controllers via 3.5 bullet connectors. You don’t need to use the encoder during normal operation, but you can tap into it with a JST XH plug to bring position and velocity control to your project.
⚠️WARNING: Stalling this motor may cause irreparable damage!This motor is extremely high-power. Use extreme caution when using it in applications with hard limits, such as linear slides and rotating arms.
Specs
| Motor Size | RS-560 |
|---|---|
| Motor Type | Brushed DC |
| Nominal Voltage | 24VDC |
| Output Shaft | 8mm REX™, 23.5mm Length |
| Gearbox Style | Planetary |
| Nominal Gear Ratio | 71.2:1 |
| Gear Ratio Formula | (1+(46/17)) * (1+(46/17)) * (1+(46/11)) |
| Gear Material | Steel |
| Wire Length | 470mm (including connectors) |
| Wire Gauge | 18AWG |
| Motor Connector Type | 3.5mm FH-MC Bullet Connectors |
| No-Load Speed | 130 RPM @ 12VDC |
| No-Load Current | 0.8A @ 12VDC |
| Stall Torque | 2000 oz-in (144 kg.cm) @ 12VDC |
| Stall Current | 30A @ 12VDC |
| Maximum Duty-Cycle at Rated Torque | 25% on, 75% off (Maximum 15 minutes Continuous) |
| Rated Torque | 358 oz-in (25.8 kg.cm) @ 12VDC |
| Speed at Rated Torque | 107 RPM @ 12VDC |
| Current Draw at Rated Torque | 6A @ 12VDC |
| Encoder Type | Relative, Quadrature |
| Encoder Sensor Type | Magnetic (Hall Effect) |
| Encoder Voltage Range | 3.3-5VDC |
| Encoder Resolution | 1993.6 PPR at the Output Shaft |
| Encoder Resolution Formula | (1+(46/17)) * (1+(46/17)) * (1+(46/11)) * 28 |
| Encoder Connector Type | 4-Pos JST XH [FH-MC] |
| Weight | 555g |
| IP | Patented |