






















The goBILDA 2000-0025-0002 is a descendant of the popular 2000-0025-0001 servo. The 25-2 received some noteworthy updates including an ultra stout steel gear train, more torque and a new top case. Like its predecessor, the 25-2 boasts two different modes which allow it to fill a variety of roles on your robot or project. In the default mode, the servo is able to rotate 300 degrees while having positioning feedback. In this mode, the PWM signal will determine the position of the servo. Using the 3102 Series Dual Mode Servo Programmer (1-1) the servo can be toggled into continuous rotation mode. In this mode, the servo will have proportional speed control based on the PWM signal that you send with your servo controller.
Specs
| Weight | 60g |
|---|---|
| Gear Ratio | 300:1 |
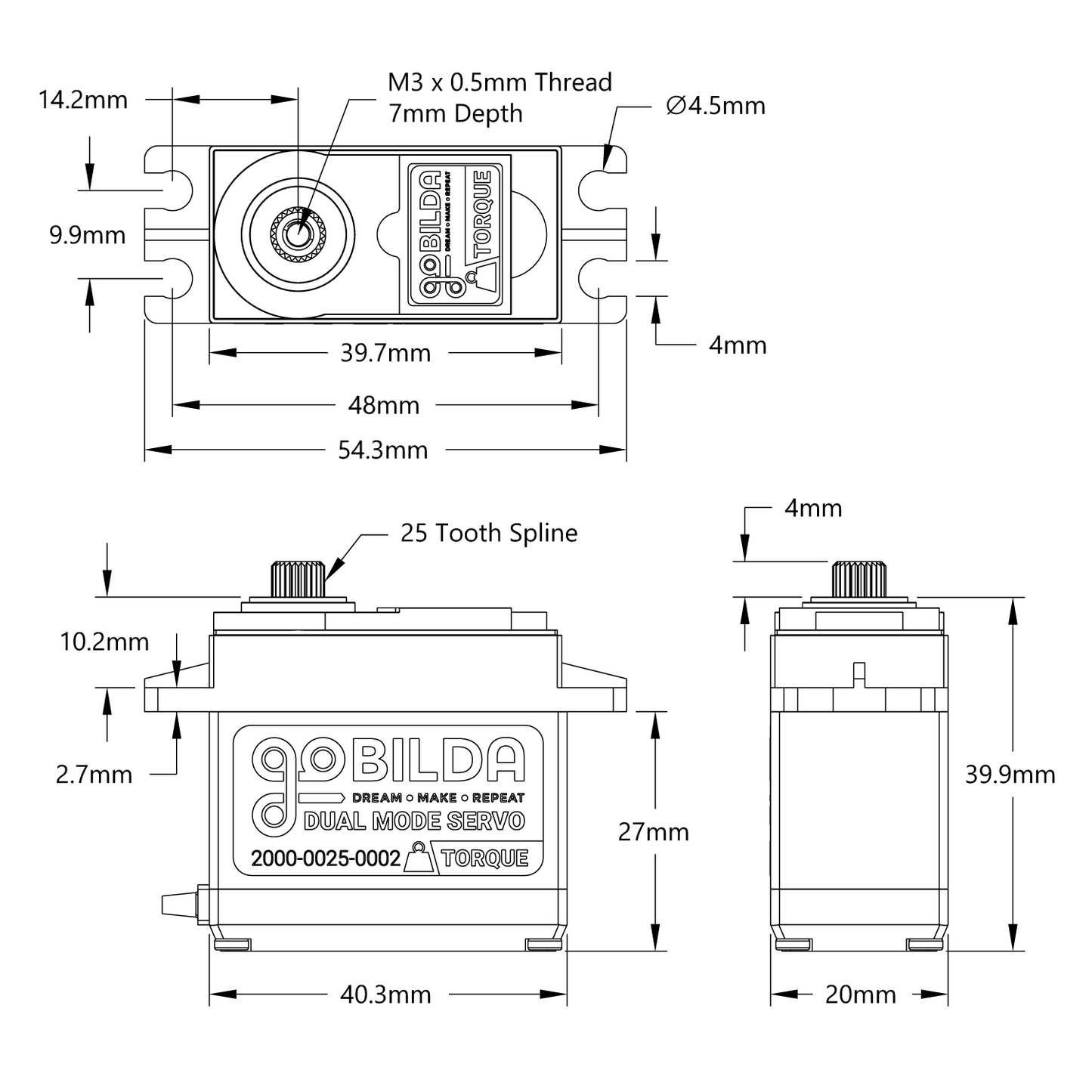
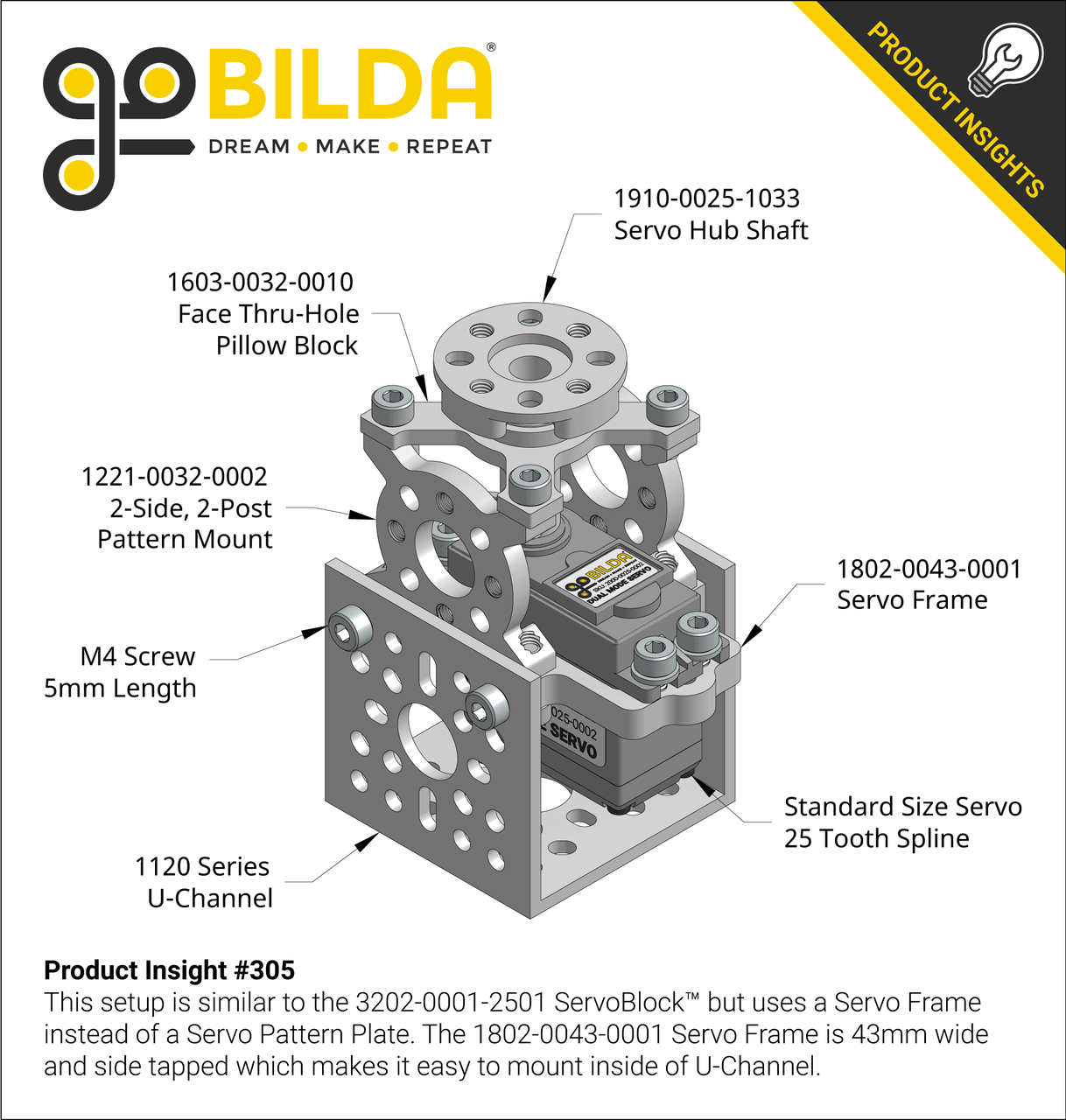
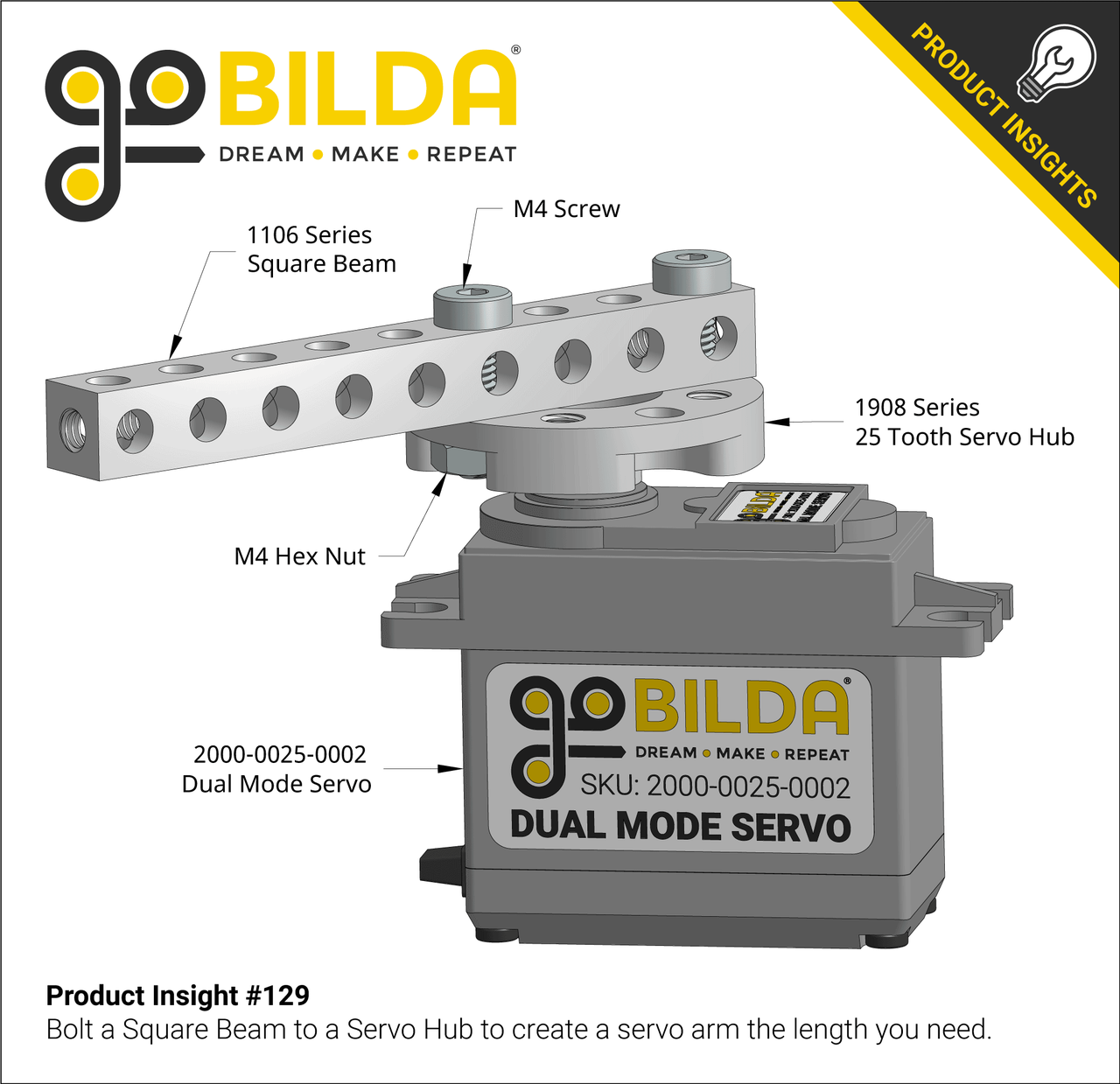
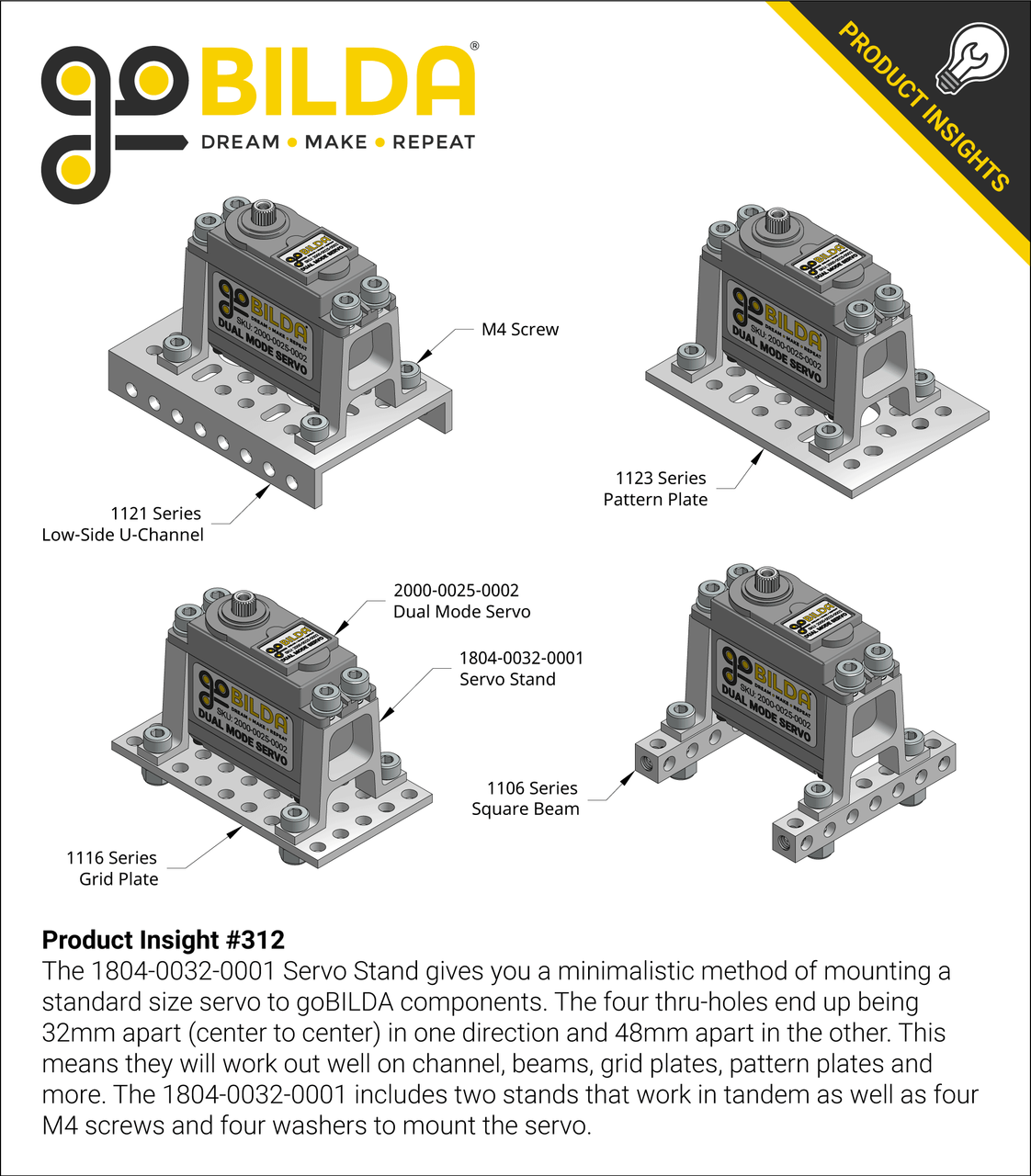
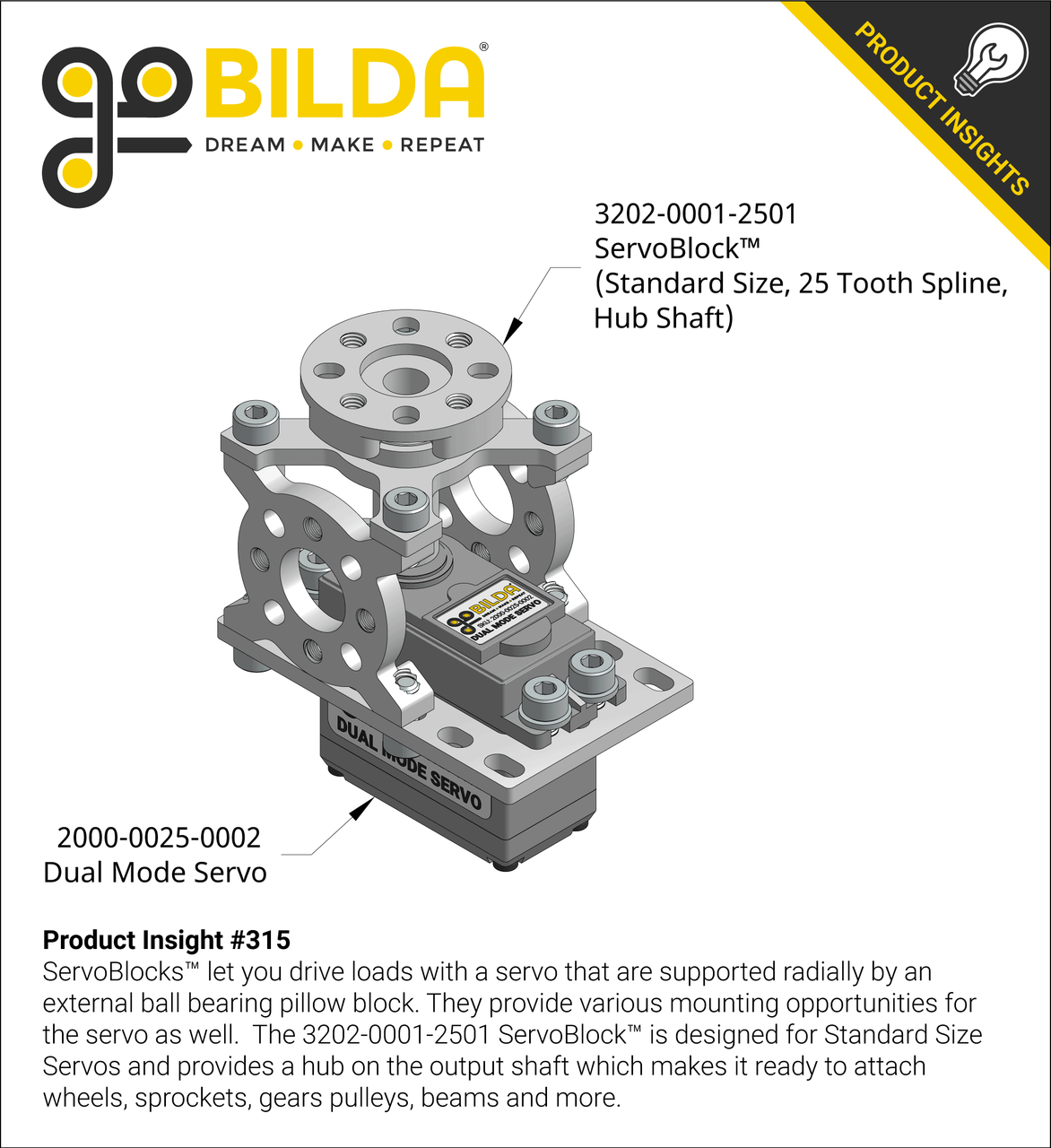
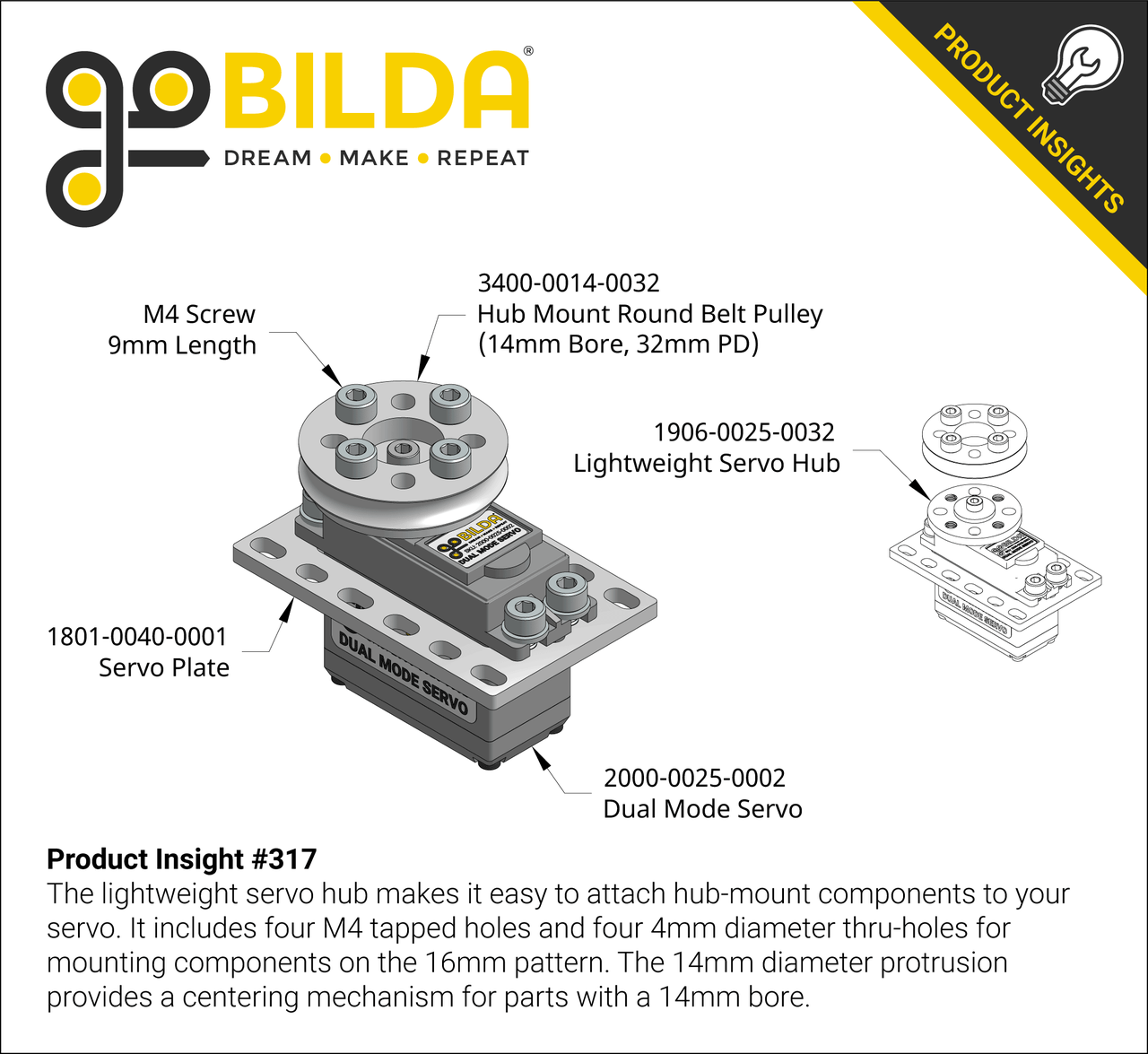
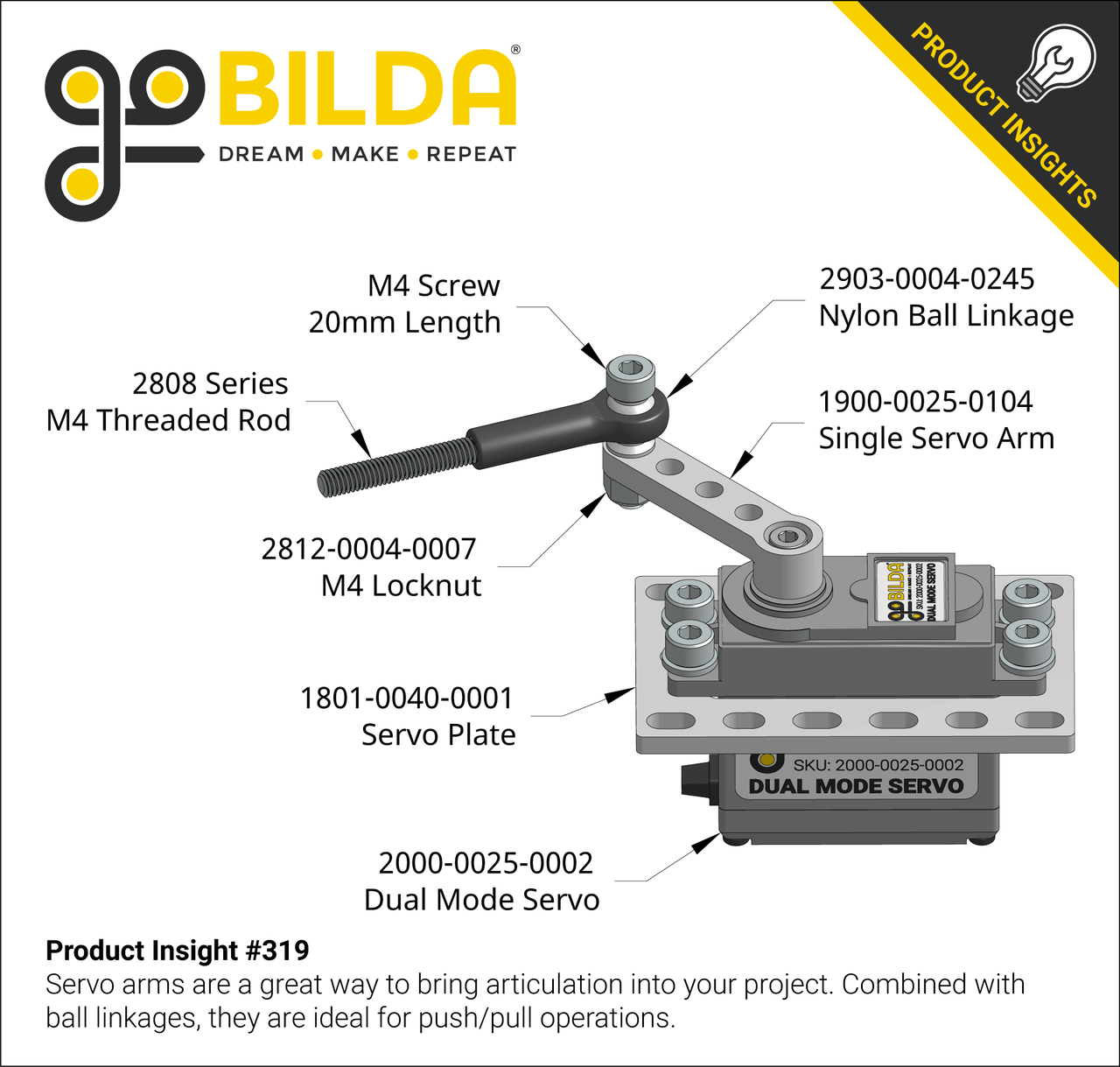
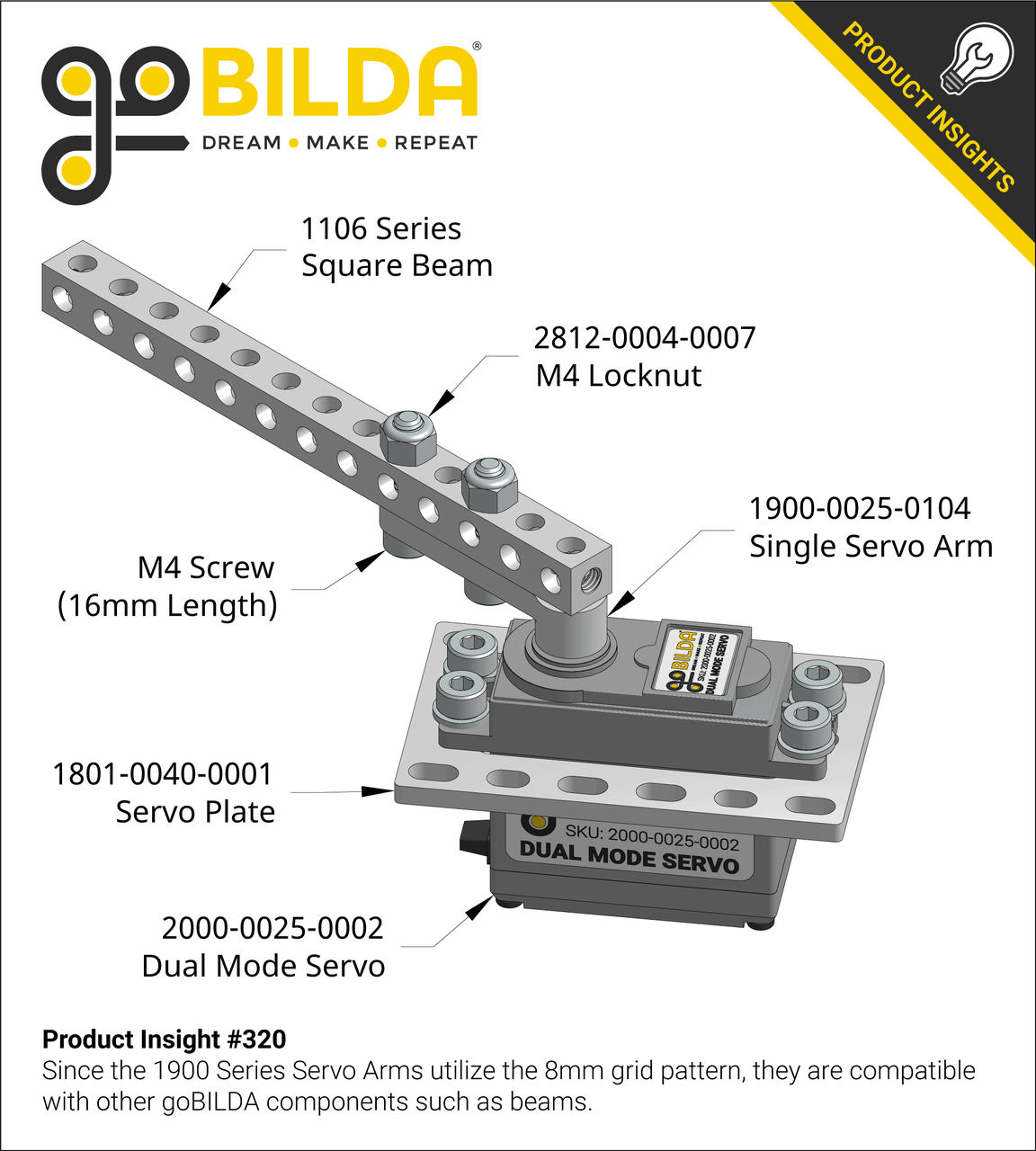
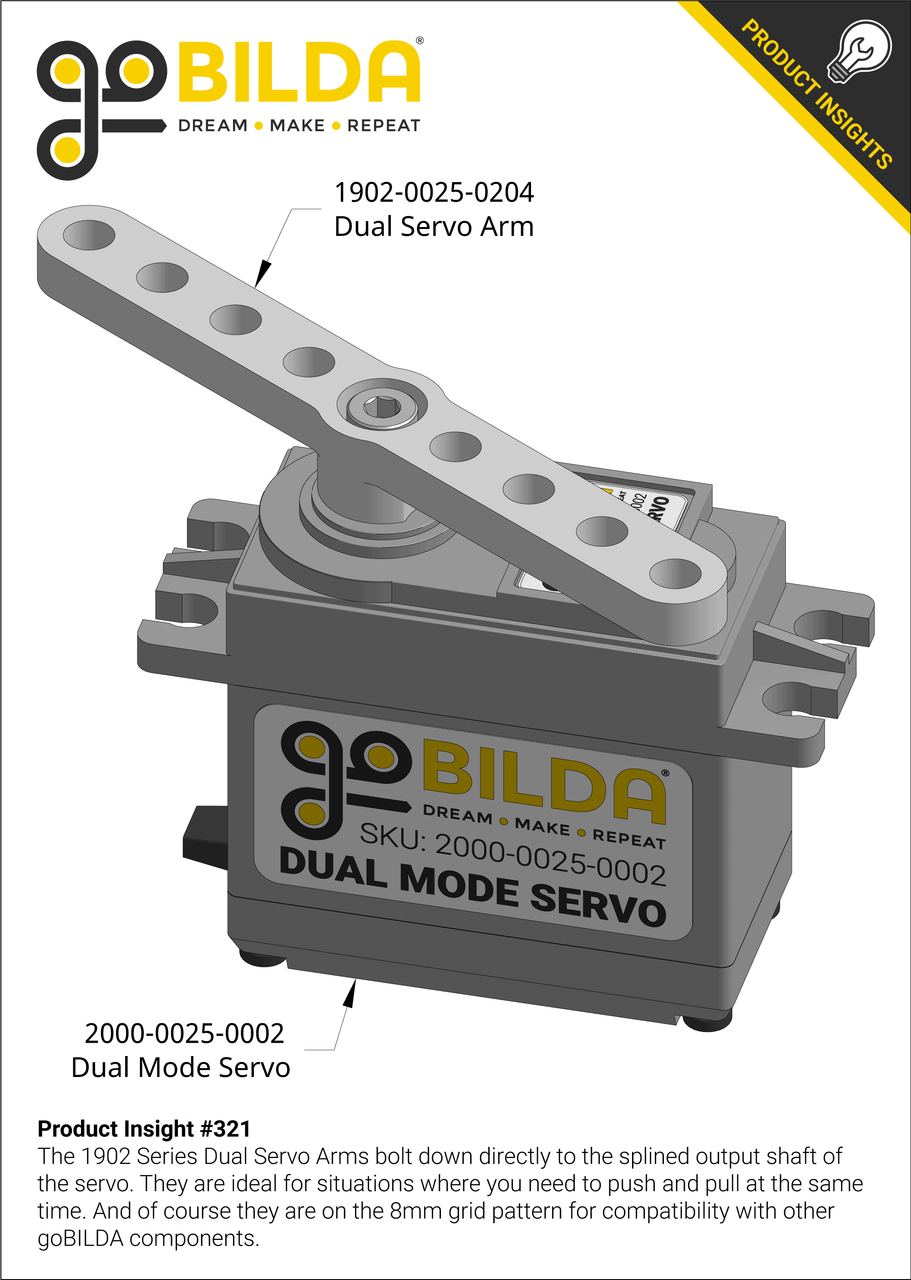
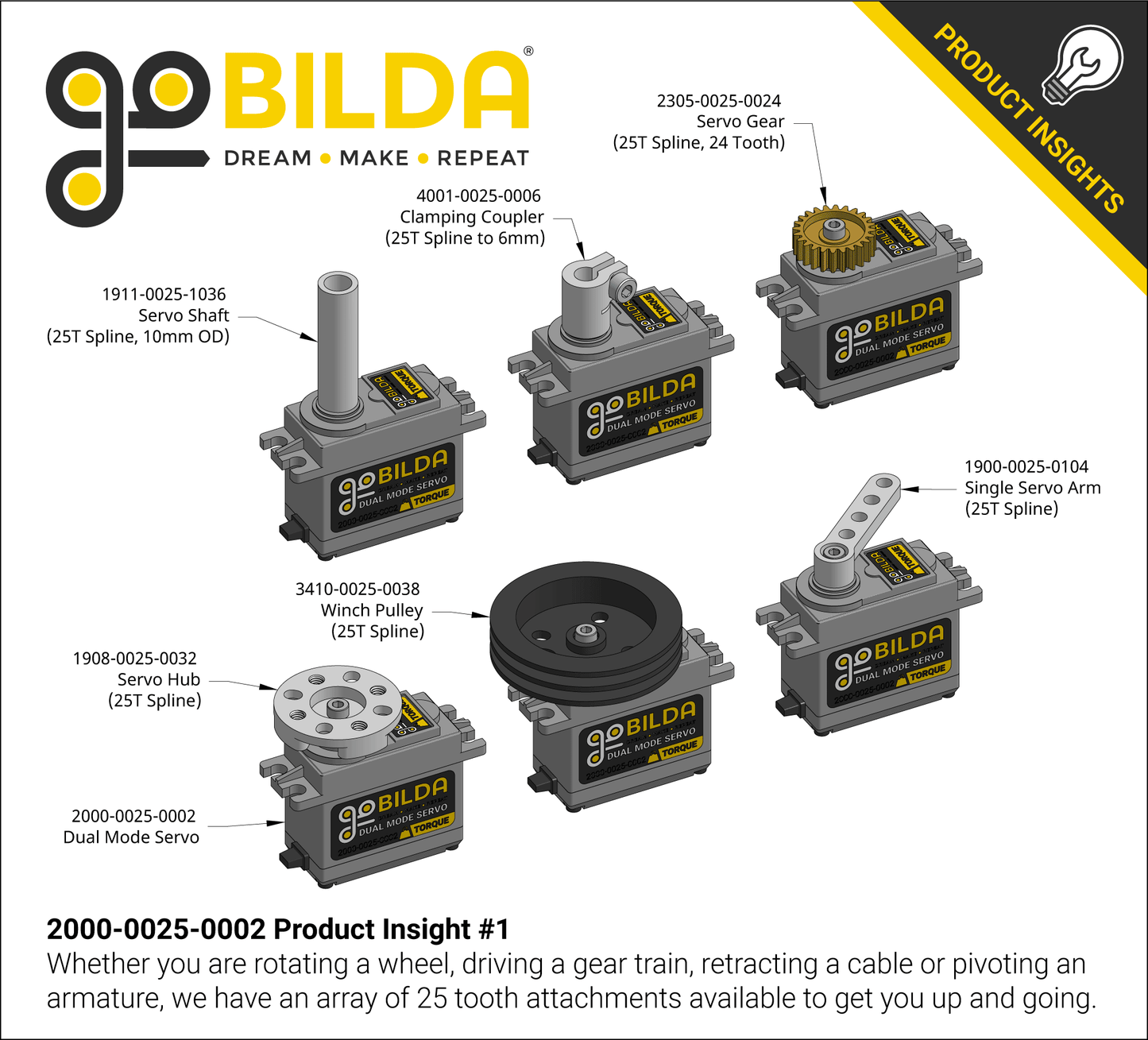
| Output Shaft Style | 25 Tooth Spline |
| Voltage Range | 4.8V - 7.4V |
| No-Load Speed (4.8V) | 0.25sec/60° (40RPM) |
| No-Load Speed (6.0V) | 0.20sec/60° (50RPM) |
| No-Load Speed (7.4V) | 0.17sec/60° (60RPM) |
| Stall Torque (4.8V) | 240 oz-in (17.2 kg.cm ) |
| Stall Torque (6.0V) | 300 oz-in (21.6 kg.cm) |
| Stall Torque (7.4V) | 350 oz-in (25.2 kg.cm) |
| No-Load Current (4.8V) | 150mA |
| No-Load Current (6.0V) | 160mA |
| No-Load Current (7.4V) | 200mA |
| Stall Current (4.8V) | 2,000mA |
| Stall Current (6.0V) | 2,500mA |
| Stall Current (7.4V) | 3,000mA |
| Max PWM Range | 500-2500μsec |
| Max PWM Range (Continuous) | 900-2100µsec |
| Travel per μsec | 0.150°/μsec |
| Max Rotation (Default Mode) | 300° |
| Pulse Amplitude | 3-5V |
| Deadband Width | 4μsec |
| Motor Type | Brushed DC |
| Feedback Style | 5KΩ Potentiometer |
| Output Shaft Support | Dual Ball Bearing |
| Gear Material | Steel |
| Wire Length | 11.81" (300mm) |
| Wire Gauge | 22AWG |
| Connector Type | 3-Pos TJC8 Servo Connector [MH-FC] |
| Servo Size | Standard |
| Direction with Increasing PWM Signal | Clockwise |