





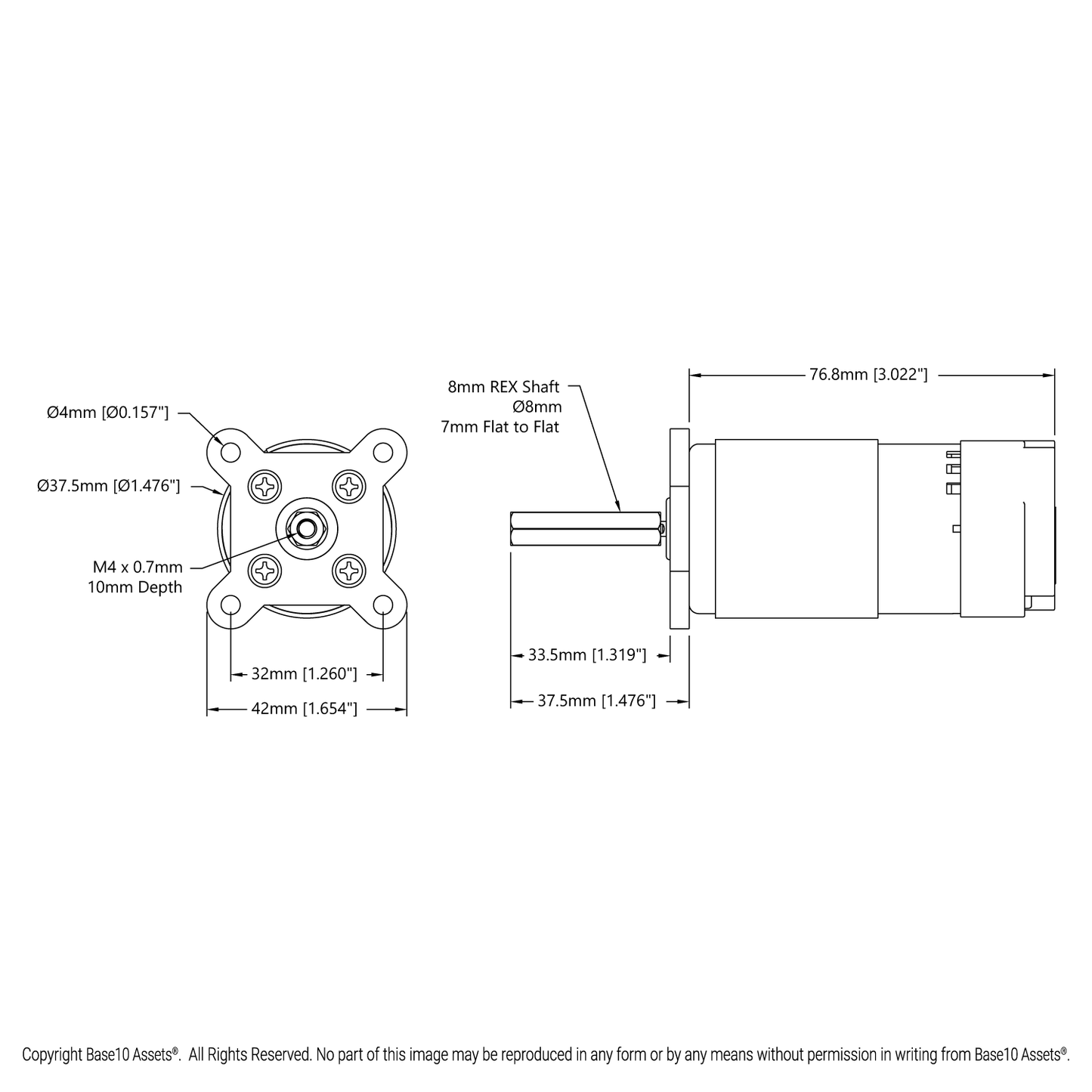
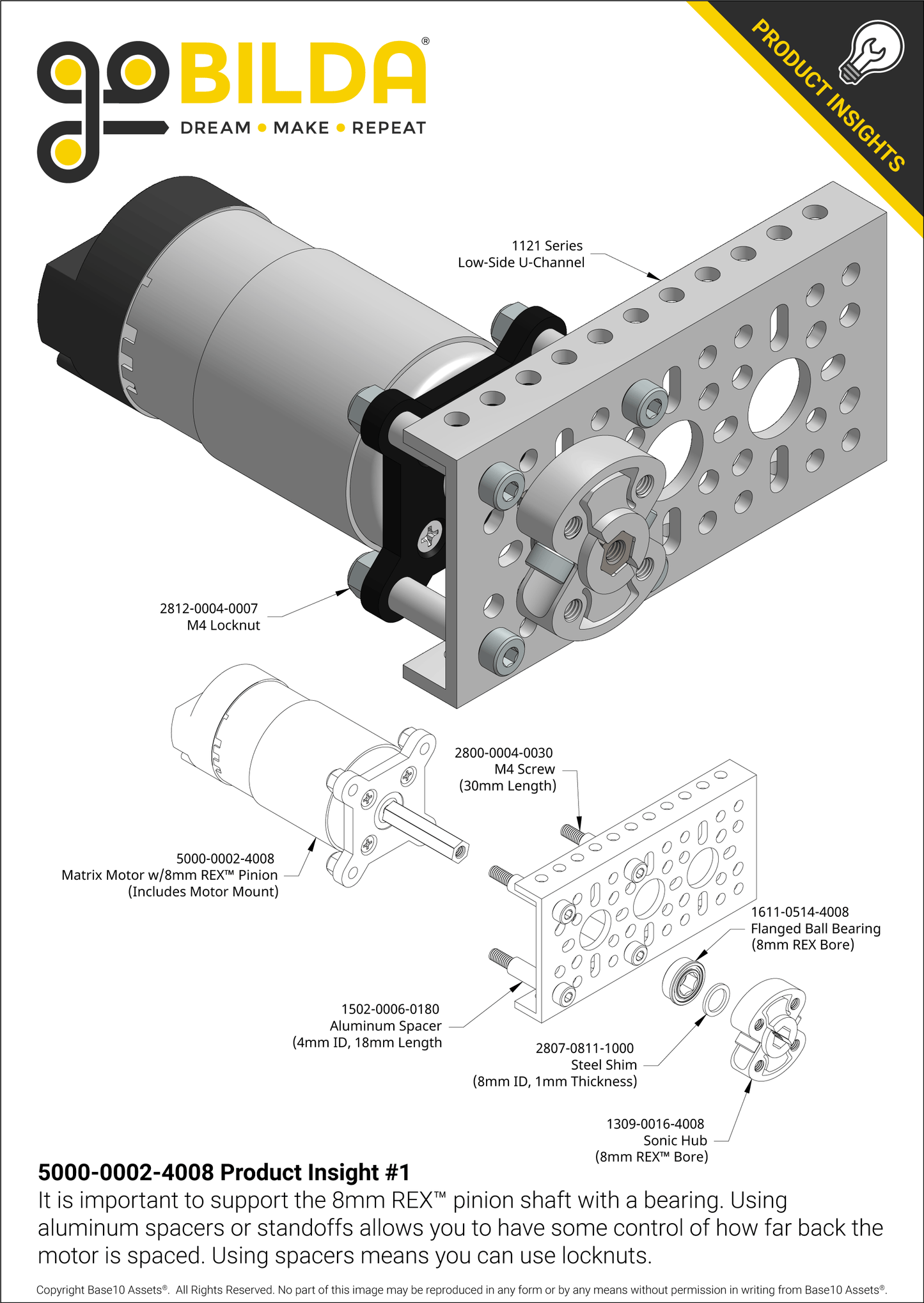
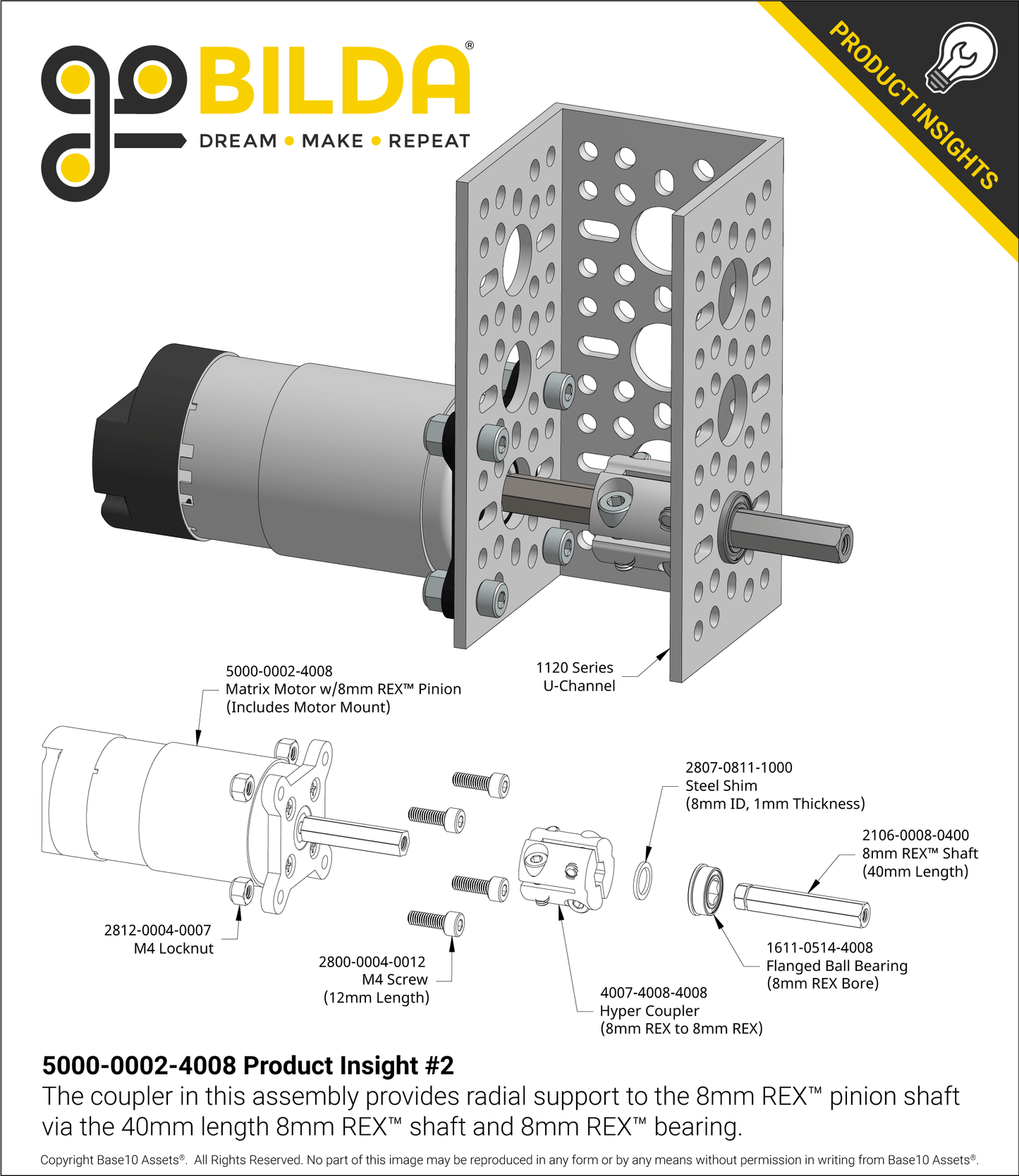
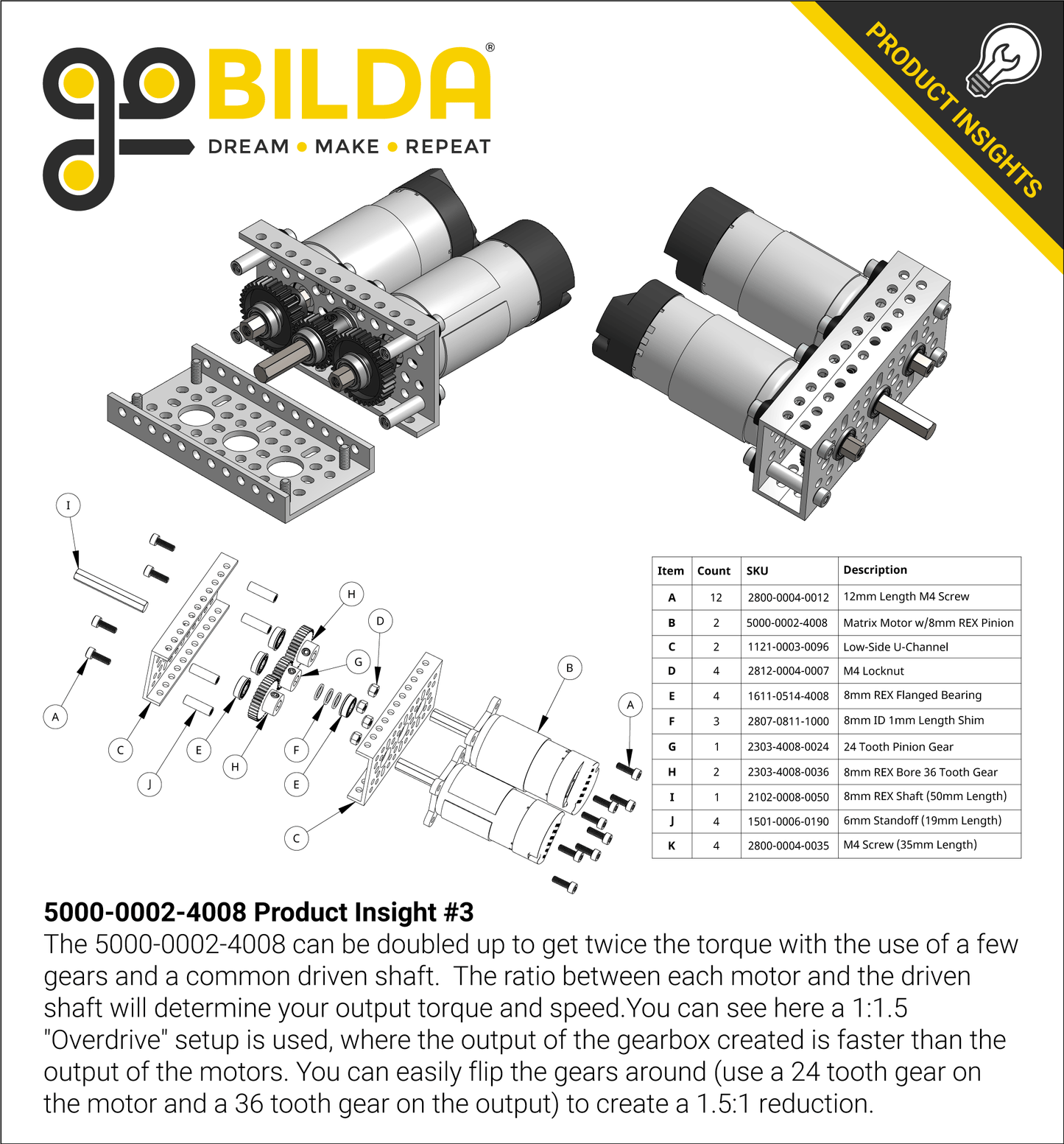
This is the motor that drives the popular Yellow Jacket Planetary Gear Motors, but with a bit of a twist. Where you would typically find a press-fit pinion gear, we’ve installed an 8 REX™ pinion shaft. What’s a pinion shaft? - well, we didn’t want to cause confusion between the factory motor shaft, which measures 0.125”, and the shaft that fits onto it, hence the unique name. The 8mm REX™ output shaft protrudes 36mm from the mounting face of the motor so you have plenty of real estate to attach a gear, pulley or hub to, while still leaving room for an 8mm REX™ bearing to add that bit of necessary support. The motor has a tested speed of 5800RPM so put on your safety glasses and let it rip!
Specs
| Weight | 254g |
|---|---|
| Motor Type | Brushed DC |
| Nominal Voltage | 12VDC |
| No-Load Speed @ 12VDC (Theoretical) | 6000 RPM |
| No-Load Speed @ 12VDC (Tested) | 5800 RPM |
| No-Load Current @12VDC | 0.25A |
| Stall Current @12VDC | 9.2A |
| Stall Torque @12VDC | 1.47 kg.cm (20.45 oz-in) |
| Wire Length | 470mm (including connectors) |
| Motor Connector Type | 3.5mm FH-MC Bullet Connectors |
| Encoder Connector Type | 4-Pos JST XH [FH-MC] |
| Encoder Type | Relative, Quadrature |
| Encoder Sensor Type | Magnetic (Hall Effect) |
| Encoder Voltage Range | 3.3 - 5VDC |
| Encoder Cycles Per Revolution (Encoder Shaft) |
7 (Rises of Ch A) |
| Encoder Cycles Per Revolution (Output Shaft) |
7 (Rises of Ch A) |
| Encoder Countable Events Per Revolution (Encoder Shaft) |
28 (Rises & Falls of Ch A & B) |
| Encoder Countable Events Per Revolution (Output Shaft) |
28 (Rises & Falls of Ch A & B) |